Medición de Peso con PIC16F
Este sitio fue creado para compartir el mutuo interés en la electrónica y en especial la programación de microcontroladores PIC.
Ahora veremos como realizar una medición de peso utilizando un modulo muy comercial que utiliza el chip HX711. Nuestro objetivo es poder medir con el PIC16F887 la magnitud en gramos o kilogramos haciendo uso de una celda de carga y el modulo amplificador HX711. El valor final del peso, se enviara como mensaje mediante una comunicación serial con el ordenador PC.
La programación se realizara utilizando el compilador XC8 y el entorno de desarrollo integrado MPLABX disponibles en la pagina de microchip de forma gratuita, por lo que sera necesario contar con conocimientos previos de microcontrolador y lenguaje C.
1. Celda de cargaUna celda de carga eléctrica permite traducir la fuerza aplicada sobre una estructura, en una señal de voltaje lineal que un microcontrolador puede medir utilizando un amplificador y convertidor ADC.
 |
Fig1. Tipos de celdas
|
 |
Fig2. Puente Wheatstone 1, 2 y 4 galgas
|
El voltaje de salida de una celda es lineal con amplitudes que se encuentran en el orden de los milivoltios, y el fabricante denota este valor proporcionando la variación mV por cada Voltio de alimentacion. Por ejemplo si la hoja de datos de una celda indica que la salida es 1mV/V, esto nos dice que si alimentamos la celda con 10V el valor final a su máxima capacidad de carga sera 10mV.
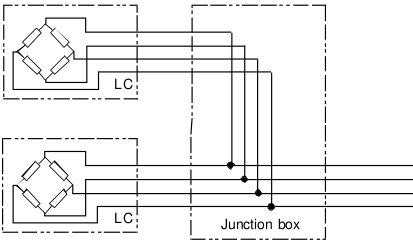
En caso de conectar mas de una celda en paralelo, la capacidad de carga total se suma y la señal de salida permanece igual siempre que utilicemos un circuito sumador conocido como combinador, caso contrario se divide por la cantidad de celdas conectadas.
 |
Fig3. Conexión en paralelo
|
La conexión en paralelo a menudo requiere utilizar resistencias
adicionales de bajo valor que se calculan para compensar la variación nominal y
distribución de carga entre las celdas, los detalles respecto a este punto no se consideran en este articulo del blog, pero la siguiente imagen ilustra un circuito con todos lo elementos necesarios para este fin.
 |
Fig4. Circuito de compensación
|
Uno de los factores externos que afecta a una celda eléctrica es la temperatura, y por esta razón es necesario registrar el voltaje de salida sin peso, para luego considerar la variación que tiene y compensar la diferencia utilizando un peso conocido. De esta manera sera posible calcular la magnitud en gramos o kg.
La celda de carga que utilizare es una MicroCell SC133 que presenta las siguientes características.- Capacidad de carga = 5000gr
- Precisión = 0.05%
- Voltaje de excitación = 3 - 14V
- Relación de Salida = 1.0± 0.15mV/V
- Efecto de la temperatura = 0.05 %F.S./10°C
 |
Fig5. Celda de un solo punto
|
2. Modulo Amplificador HX711
Como la salida de una celda de carga es un voltaje analógico de muy baja amplitud, sera necesario amplificar la magnitud para su tratamiento. En un sistema digital esta señal deberá convertirse a un valor digital utilizando un convertidor analógico a digital ADC.
El circuito integrado HX711 disponible únicamente en formato SOP de 16 pines incorpora un amplificador de ganancia programable (PGA) con un convertidor Analógico-Digital (ADC) de 24-bit para dos canales. Ademas es posible conseguir este IC como un modulo compacto ya con los componentes minimos para su funcionamiento, tal como se observa en las figura 6 y 7, estos sin duda nos facilita la conexion de la celda de carga con nuestro microcontrolador.
 |
Fig6. Esquema del modulo HX711
|
 |
Fig7. Modulo Integrado HX711
|
Alguno detalles adicionales del Amplificador ADC HX711 son:
- El voltaje de alimentación de 2.6 a 5.5V
- Rango de temperatura de -40 a 85°C
- Ganancia canal A ajustable de 64 o 128
- Ganancia canal B fija de 32
- Rango entrada diferencial AVDD(E+)/Ganancia
- Salida serial sincronizada de 24-bit
Un dato importante con respecto a la lectura de datos, es que el pin RATE permite ajustar el tiempo a 10Hz (RATE = 0) o 80Hz (RATE = 1), por lo tanto sera necesario verificar en el modulo a que nivel esta conectado este pin.
La comunicación serial utiliza un pin de entrada SCK para recibir pulsos de sincronización del microcontrolador y un pin de salida DT para enviar los datos digitales al microcontrolador. Así mismo la salida DT cambia a nivel bajo cuando hay datos listos para enviar, esperando entre 25 y 27 pulsos de sincronización para enviar cada uno de los bits.
Durante una lectura el microcontrolador debe enviar mínimo 25 pulsos de reloj, y opcionalmente los pulsos 26 y 27 para determinar con que canal y ganancia se trabajara.
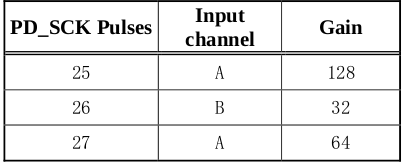 |
Fig8. Tabla para selección de canal y ganancia
|
Análisis del Amplificador HX711
Si el rango de voltaje en la salida del amplificador a escala completa es AVDD/Ganancia, si alimentamos la celda con 5V entonces es posible utilizar las siguientes escalas para la entrada:
- ±80mV si la ganancia es 32, solo en canal B
- ±40mV si la ganancia es 64, canal A
- ±20mV si la ganancia es 128, canal A
La salida digital de 24-bit de este Amplificador esta en formato complemento a dos dentro del rango que va desde un valor mínimo de 800000h (Vi- > Vi+) a máximo de 7FFFFFh (Vi+ > Vi-), una manera de obtener un valor absoluto de la salida digital es aplicar en la salida una suma exclusiva de 0x800000, con esto se lograra ajustar los valores a:
Valor Negativo (Vi- > Vi+) Rango absoluto de 000000h a 7FFFFFh
Valor Positivo (Vi+> Vi-) Rango absoluto de 800000h a FFFFFFh
Analisis de la Celda SC133
Si la celda se alimenta con 5.0V con su relación de salida 1.0mV/V nos proporcionara un voltaje de 5mV (5.0 * 0.001) a su máxima capacidad de carga (5Kgr). Con este valor podemos determinar que la mejor escala de trabajo en la entrada de nuestro amplificador HX711 es el canal A con ganancia 128, que nos permite trabajar en ±20mV (configuracion por defecto), entonces considerando la escala asignada podemos determinar que la relación de voltaje por bit en la salida del Amplificador sera: RV = 0.040V/2^24
Ahora con estos valores conocidos podemos calcular la relación de bits por unidad de peso, por ejemplo si ejercemos un peso de 100 gramos sobre la celda de carga su voltaje de salida sera 5mV*100gr/5000gr=0.1mV, entonces la salida digital del amplificador HX711 para este voltaje sera 0.1mV/RV = 41943. A continuación se muestra una tabla con diferentes valores para el calculo:
Peso (gr) Voltaje (mV) Salida (24-bit)
5000 5mV 2097152 -> 200000h
1000 1mV 419430 -> 066666h
100 0.1mV 41943 -> 00A3D7h
10 0.01mV 4194 -> 001062h
1 0.001mV 419 -> 0001A3h
Tabla 1. Relación de salida por unidades de peso en gramos.
Tomar en cuenta que el resultado de 24-bit recibido del amplificador HX711 esta en formato complemento a dos, y para obtener un valor absoluto se debe sumando de forma exclusiva el valor 800000h.
Otro punto a considerar es la precisión de la celda que de acuerdo a la especificación técnica indica un 0.05% a maxima carga, por lo tanto (5000 gr) * (0.05/100) = 2.5 gramos representaría nuestro margen de error en la salida con relación al peso exacto en la celda. Para convertir este error en un valor digital podemos multiplicarlo por la relación de la salida para cada gramo que se muestra en la tabla 1, es decir 2.5gr * 419 = 1047.5, esto a su vez nos indica que los 10-bits (0-1023) de menor peso en la salida del Amplificador HX711 representan una zona de inexactitud que tiene la celda.
Como ultimo punto a mencionar es que el modulo HX711 suministra a la celda 4.2V y no los 5.0V utilizado en nuestro calculo, esto debido a la caída de voltaje en el Emisor-Colector del transistor PNP que controla al amplificador, por lo tanto el voltaje final a máxima capacidad de carga sera solo 4.15mV y por esta razón el resultado en la salida del Amplificador será algo inferior a los valores calculados previamente.
Peso (gr) Voltaje (mV) Salida (24-bit)
5000 4.20mV 1761607 -> 1AE147h
1000 0.84mV 352320 -> 056040h
100 0.084mV 35232 -> 0089A0h
10 0.0084mV 3523 -> 000DC3h
1 0.00084mV 352 -> 000160h
Tabla 2. Relación de salida por unidades de peso en gramos.
De todas maneras esto no afectara el resultado final gracias a un procedimiento de calibración que utilizaremos para registrar un valor de referencia o peso conocido que se utilizara para calcular el peso real, lo importante en todo caso es que la celda mantenga una linealidad entre la fuerza aplicada y el voltaje de salida.
3. Esquema del circuito PIC16F887
La siguiente imagen describe en forma resumida el esquema de conexión para la celda, el amplificador y el microcontrolador utilizado en el ejemplo. El PIC16F887 se alimentara con 5V y la programación se efectuara vía ICSP, un LED conectado al pin RE2 destellara para indicar que el programa esta funcionando, un pulsador BUT conectado al pin RB2 servirá para iniciar el procedimiento de calibración y el pin RC6 corresponde a la salida TXD del modulo USART. La información del peso se enviara en un mensaje al ordenador utilizando un convertidor serial TTL/USB.
 |
| Fig9. Circuito para Medición de Peso |
4. Programa de Lectura
Ahora crearemos el programa de lectura para el PIC16F887, y para esto necesitamos revisar la señalización de salida que tiene el amplificador HX711 que es relativamente simple de acuerdo a los siguientes pasos:
- El HX711 coloca el pin DOUT en nivel bajo para indicar que hay datos listos para enviar.
- El PIC16 detecta si hay disponibilidad de datos verificando la linea DOUT.
- Para iniciar la lectura el PIC16 enviará mínimo 25 pulsos de reloj, y entre cada pulso realiza la lectura de nivel de la linea DOUT, almacenando estos valores en un registro de 24bits.
- Opcionalmente el PIC puede enviar un o dos pulsos para cambiar de canal o ganancia en la siguiente lectura.
 |
Fig10. Señalización serial
|
El programa descrito a continuación muestra el uso de la función de lectura del canal A con ganancia 128 para el modulo HX711, esta función llamada HXReadvalue devuelve un valor absoluto.
#pragma config FOSC = INTRC_NOCLKOUT
#pragma config WDTE = OFF, LVP = OFF
#include <stdio.h>
#include <xc.h>
#define _XTAL_FREQ 8000000 //Frecuencia 8MHz
#define HX_DATpin PORTBbits.RB1 //Pin de salida DOUT
#define HX_SCKpin PORTBbits.RB0 //Pin de pulsos CLK
#define LEDpin PORTEbits.RE2 //Pin de salida LED
unsigned long adcval = 0; //Registro de 32 bits
unsigned long HXReadvalue(); //Prototipo de función
void main()
{
OSCCONbits.IRCF = 0b111; //Oscilador a 8MHz Tcy 0.5u
while(!OSCCONbits.HTS); //Espera hasta estabilizar INTOSC
ANSEL = 0; //Deshabilita los pines Analógicos ANS0-ANS7
ANSELH = 0; //Deshabilita los pines Analógicos ANS8-ANS13
TRISEbits.TRISE2 = 0; //Salida pin LED
TRISBbits.TRISB0 = 0; //Pin CLK de salida
TRISBbits.TRISB1 = 1; //Pin DOUT como entrada
//OPTION_REGbits.nRBPU = 0; //Activa las Pullup del PORTB
TXSTAbits.BRGH = 1; //USART en modo de alta velocidad
BAUDCTLbits.BRG16 = 0; //Generador de Baudios de 8-bit
SPBRG = 52; //Fosc/(16x(9600+1))
TXSTAbits.TXEN = 1; //Habilita el transmisor
RCSTAbits.SPEN = 1; //Habilita el modulo USART
while(1)
{
adcval = HXReadvalue();
adcval &= 0x00FFFFFF; //Enmascara los 24bits
printf("VAL:%lu\r\n", adcval); //Muestra el valor
__delay_ms(1000);
LEDpin = !LEDpin; //Destello LED
}
}
unsigned long HXReadvalue()
{
unsigned long value = 0;
char i = 0;
HX_SCKpin = 0;
while(HX_DATpin); //Espera disponibilidad
for(i = 0; i < 24; i ++) //Solo 25 pulsos Canal A
{
HX_SCKpin = 1;
value <<= 1; //1uS retardo
HX_SCKpin = 0;
if(HX_DATpin) //Lectura del pin DOUT
value ++; //Coloca 1 al bit lsb
}
HX_SCKpin = 1;
value ^= 0x800000; //Convierte a un valor absoluto
HX_SCKpin = 0;
return value;
}
Al correr este programa y conectado a una terminal podemos observar que los datos recibidos presentan fluctuaciones en los ultimo dígitos, y por ello es preferible trabajar con promedios por intervalo de tiempo.
Para no efectuar cambios mayores a este programa y debido que el modulo que utilizo tiene el pin RATE conectado a tierra, lo cual me dice que los datos estarán disponibles cada 0.1 segundo(10Hz), siendo necesario al menos 10 segundos para efectuar un promedio de 100 lecturas, adicionare una linea al programa principal para descartar los últimos 4 bits, y así obtener un valor mas estable. Además considerando que la relación de bits por gramo calculado es de 419, el máximo error provocado si la diferencia fuera 15(4-bits), sera 0.038 gramos.
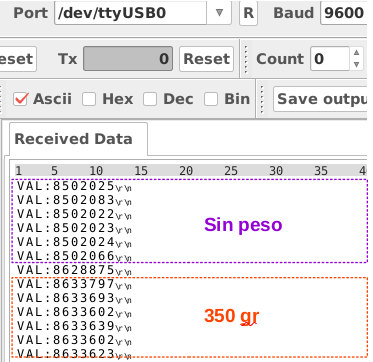 |
Fig11. Resultado de lectura de celda
|
Con la linea adicional el bucle indefinido del programa principal queda de la siguiente manera.
while(1)
{
adcval = HXReadvalue();
adcval &= 0x00FFFFFF; //Enmascara los 24bits
adcval = adcval >> 4; //Descarta los últimos 4 bits
printf("VAL:%lu\r\n", adcval); //Muestra el valor
__delay_ms(1000);
LEDpin = !LEDpin; //Destello LED
}
 |
Fig12. Resultado de celda sin los últimos 4 bits
|
En este punto lo que necesitamos para que el PIC pueda determinar y mostrar el peso en gramos es agregar un algoritmo que determine la diferencia entre una lectura sin peso y otra con un peso conocido, esta diferencia servirá para efectuar un calculo final aplicando una regla de tres. Un ejemplo para las lecturas de la figura anterior, tomando en cuenta los valores que mas se repiten sera: El valor de referencia sin peso Dref = 531356, y la diferencia cuando se utiliza un peso de 350 gramos es Dif = 539550 - Dref = 8194, entonces para determinar un nuevo peso aplico la siguiente regla Peso = (Lectura - Dref) * 350 / Dif.
Ahora modificamos el programa con estos valores de referencia calculados para obtener las siguientes lecturas de la imagen inferior.
while(1)
{
adcval = HXReadvalue();
adcval &= 0x00FFFFFF; //Enmascara los 24bits
adcval = adcval >> 4; //Descarta los últimos 4 bits
if(adcval > 531356) //No debe ser menor a la Dref
adcval = (adcval - 531356) * 350 / 8194; //Formula
else adcval = 0;
printf("VAL:%lu\r\n", adcval); //Muestra el valor
__delay_ms(1000);
LEDpin = !LEDpin; //Destello LED
}
 |
Fig13. Lecturas de peso en gramos
|
Se observa que los cálculos realizados por el programa ya ajustado a las referencias medidas, muestran una variación con los pesos reales indicados en la imagen. Esto se debe a que utilize unos envases de conserva que no tienen una medida exacta, incluso ensayando dos de ellos al azar, uno indica 141 gramos y el otro 152 gramos, por lo tanto para efectuar un ajuste real debes utilizar pesos de referencia exactos.
 |
Fig14. Balanza de prueba
|
5. Programa de Calibración
Es necesario crear un procedimiento de calibración que permita registrar el valor de salida que tiene la celda sin peso alguno y luego registrar el valor de salida con un peso conocido para así determinar la variación resultante, luego esta información debería almacenarse en una memoria no volátil para evitar repetir el proceso cada vez que el microcontrolador se reinicie, la calibracion solo es necesario cuando la celda es reemplazada o cuando la variación de temperatura sea considerable, para darnos una idea sobre como afecta la temperatura revisando la ficha técnica de esta celda, indica que error por efecto de la temperatura es 0.05% F.S./10°C, lo que significa que la variación por cada 10°C sera de 2.5 gramos(0.05/100) * 5000).
Si el peso de referencia es 140g, la ecuación de calculo analizado anteriormente resulta en Peso (gramos) = (Lectura - Dref) * 140 / Dif.
El código de ejemplo para este procedimiento realiza la calibracion utilizando el pulsador BUT en tres pasos:
paso 1. Cuando se presiona el pulsador por al menos un segundo, se inicia el procedimiento de calibracion y se mantiene en modo espera indicando por mensaje que se libere de peso la balanza
paso 2. Con la balanza libre de peso, se presiona nuevamente el pulsador para que el procedimiento registre el valor de la celda Dref y luego envié otro mensaje solicitando colocar un peso conocido, en nuestro caso 140 gramos.
paso 3. Ya con el peso de referencia sobre la balanza, se presiona nuevamente el pulsador para que el procedimiento registre el valor de la celda y calcula la diferencia Diff = Valor con peso - Dref.
Con la finalidad de que el código escrito hasta el momento no sufra cambios en su lógica, es que las lineas de código necesarias para este procedimiento de ajuste se adicionan al bucle principal utilizando retardos indefinidos, con el único fin de mostrar su funcionamiento. Para una implementación real es recomendable apoyar este procedimiento con interrupciones o técnicas de programación mas robustas como ser una maquina estados finitos.
Entonces al bucle del programa principal adicionaremos la detección del pulsador, que en caso de ser presionado llamara al procedimiento de Ajuste.
while(1)
{
adcval = HXReadvalue();
adcval &= 0x00FFFFFF; //Enmascara los 24bits
adcval = adcval >> 4; //Descarta los últimos 4 bits
if(adcval > Dref) //No debe ser menor a la Dref
adcval = (adcval - Dref) * 140 / Diff; //Formula
else adcval = 0;
printf("VAL:%lu\r\n", adcval); //Muestra el valor
__delay_ms(1000);
LEDpin = !LEDpin; //Destello LED
if(BUTpin == 0) //Primer pulso de boton
{
delay_ms(50);
if(BUTpin == 0)
{
while(BUTpin);
Ajuste(); //llama al procedimiento de ajuste
}
}
}
El procedimiento de ajuste bloqueara la secuencia del bucle principal con su propio bucle el cual finalizara solo cuando el pulsador es presionado por tercera vez.void Ajuste() //Procedimiento para mostrar
{
char paso = 0, loop = 1;
printf("Retire Peso y presione BUT\r\n"); //Muestra el valor
while(loop)
{
adcval = HXReadvalue();
adcval &= 0x00FFFFFF; //Max 8000000h set MSB to 0
adcval >>= 4;
printf("ADC:%lu\r\n", adcval);
__delay_ms(1000);
if(BUTpin == 0) //Segundo pulso de botón
{
__delay_ms(50);
if(BUTpin == 0) //Tercer pulso de botón.
{
while(BUTpin);
if(paso == 1)
{
Diff = adcval - Dref;
printf("Ajuste final %06u", Diff);
loop = 0; //Finaliza el bucle del procedimiento
}
if(paso == 0)
{
Dref = adcval;
paso ++;
printf("Coloque Peso y presione BUT\r\n");
}
}
}
}
}
Compilamos y cargamos nuevamente el código al microcontrolador para efectuar una prueba de funcionamiento, logrando el resultado que se ilustra en la siguiente imagen.
 |
| Fig15. Resultados de una calibracion. |
6. Interfaz visual con QT
Esta parte es opcional solo para demostrar como crear una aplicación de escritorio que visualice la información del peso en gramos con un formato mas legible y elegante. Se da por entendido que ya cuentas con el conocimiento y experiencia en la programación orientada a
objetos con C++. Para crear la esta aplicación de Escritorio utilizare la plataforma de código abierto QT(Community), con el IDE QTCreator instalado en el sistema operativo Linux-Debían 11.
El primer paso una vez iniciado QTCreator, es crear un proyecto para escritorio(Qt Widgets Applicaction), en el ejemplo se coloca el nombre HX711_PICMonitor. Ya con el proyecto creado y configurado se adicionara al formulario visual mainwindow.ui los objetos visuales que formaran parte de la interfaz. La siguiente figura muestra los elementos utilizados en la aplicación.
 |
Fig16. Aplicación de Lectura MonitorHX711
|
Para establecer la comunicación y recibir los datos serie del PIC, QT cuenta con la clase QSerial y debemos incluirlo en el proyecto adicionando a la linea QT += serialport en el archivo de proyecto HX711_PICMonitor.pro, Luego de esto solo resta trabajar con los archivos del programa principal que son: mainwindows.cpp y mainwindows.h
//Archivo mainwindows.cpp
MainWindow::MainWindow(QWidget *parent)
: QMainWindow(parent), ui(new Ui::MainWindow)
{
ui->setupUi(this);
port = new QSerialPort();
connect(port, SIGNAL(readyRead()), this, SLOT(readSerialPort()));
foreach(const QSerialPortInfo &portinfo, QSerialPortInfo::availablePorts())
{
ui->comboBox->addItem(portinfo.systemLocation());
}
}
MainWindow::~MainWindow()
{
delete ui;
}
void MainWindow::readSerialPort()
{
QByteArray databytes;
if(port->canReadLine()) //Espera el siguiente Texto VAL:347\r\n
{
databytes = port->readLine();
QString msg(databytes);
msg.remove(0,4); //Quita el texto "VAL:"
ui->lcdNumber->display(msg.toInt()); //Muestra el valor
}
}
void MainWindow::on_checkBox_stateChanged(int arg1)
{ if(ui->checkBox->isChecked())
{
port->setPortName(ui->comboBox->currentText());
port->setBaudRate(port->Baud9600, port->Input);
port->setFlowControl(port->NoFlowControl);
if(port->open(QIODevice::ReadOnly))
ui->statusbar->showMessage("Puerto Conectado", 0);
else
ui->statusbar->showMessage("Error de conexion", 0)
}
else
{
if(port->isOpen())
{
port->close();
ui->statusbar->showMessage("Puerto Desconectado", 5000);
}
}
}
//Archivo mainwindows.h
#include <QMainWindow>
#include <QSerialPort>
#include <QSerialPortInfo>
QT_BEGIN_NAMESPACE
namespace Ui { class MainWindow; }
QT_END_NAMESPACE
class MainWindow : public QMainWindow
{
Q_OBJECT
public:
MainWindow(QWidget *parent = nullptr);
~MainWindow();
private slots:
void readSerialPort();
void on_checkBox_stateChanged(int arg1);
private:
Ui::MainWindow *ui;
QSerialPort *port;
};
En la siguiente imagen se muestra como la aplicacion Qt informa del peso en gramos que envia el microcontrolador. |
| Fig17. Aplicación de Lectura MonitorHX711 |
7. Recomendación y Conclusión
Es recomendable utilizar una celda que tenga un capacidad superior a los limites que utilizo en el diseño. por ejemplo si considero que el limite de carga es 100Kg, utilice una celda de 150Kg. Caso contrario reduzca el limite de carga máxima.
También mencionar que si bien el valor referencia Dref medido cada dia, cada hora o cuando se apaga y enciende el circuito puede variar considerablemente, la relación Diff se mantendrá, una opción interesante para evitar estas variaciones es hacer que el proceso de lectura inicie siempre con la celda libre de carga, para registrar ese valor como la referencia inicial Dref y luego colocar la carga a medir, este lapso no demora mas de un segundo.
Aquí dejo los enlaces para que puedas descargar los proyectos creados con MPLAB y QT para este blog, como usuario de linux comentar que ambos proyectos están comprimidos en gzip y es probable que necesites modificar algunas referencias si quieres compilar en Windows.
Sin mas que mencionar agradezco tu visita al blog y espero que el ejemplo visto pueda ser útil en tu formación y el proyecto que desarrollas.
Atte. Pablo Zárate Arancibia
email: pablinza@me.com / pablinzte@gmail.com
@pablinzar
Santa Cruz de la Sierra - Bolivia
Referencias Adicionales.


{kind=link}